



在随着工业自动化水平的不断提高,对精密测量的需求日益增长。六轴力传感器作为一种能够同时测量三个线性方向和三个旋转方向上力和力矩的高精度设备,在机器人技术、自动化控制、航空航天、医疗设备等领域展现出了巨大的应用潜力和价值。
一、六轴力传感器是什么
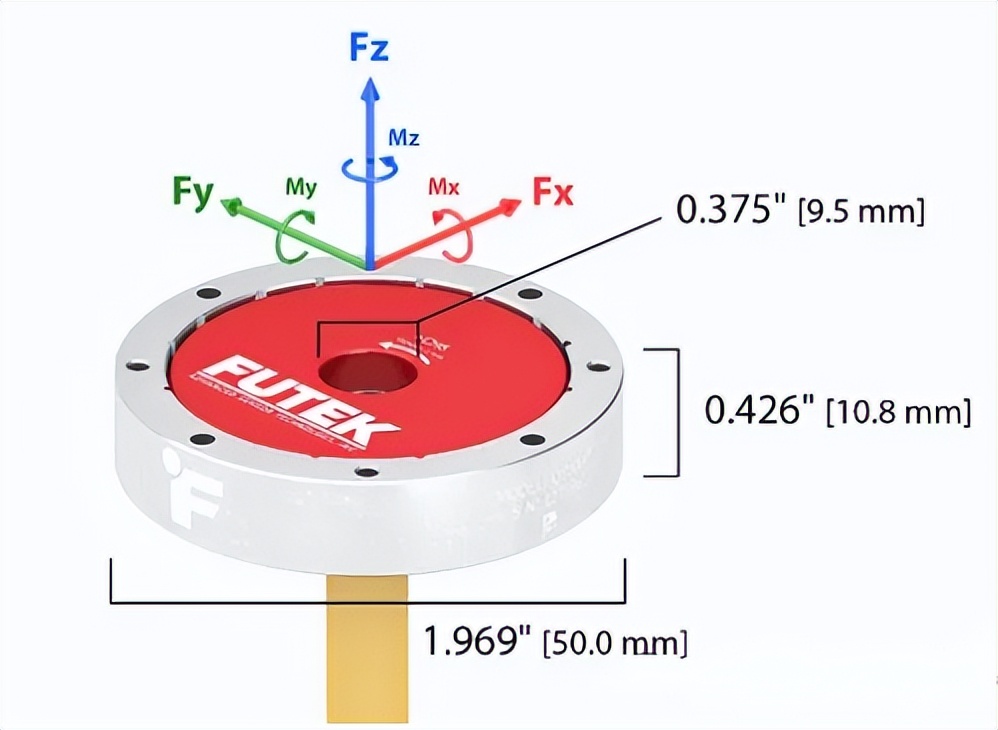
六轴力传感器是一种能够同时测量六个自由度(DoF)的力和扭矩的传感器。在三维空间中,物体的运动可以被分解为三个线性方向上的平移(通常表示为X、Y和Z轴)以及绕这三个轴的旋转(通常表示为Rx、Ry和Rz,也可以表示为Tx、Ty、Tz来指扭矩)。因此,六轴力传感器可以测量三个线性力和三个扭矩。六轴力传感器的设计可以采用不同的技术实现,包括但不限于应变片技术、压电效应等。这些传感器通常非常精确且灵敏,能够在各种环境中提供可靠的数据。在使用时,它们需要与适当的信号处理硬件和软件一起工作,以便将原始传感器读数转换为有用的力和扭矩信息。

二、六轴力传感器的工作原理
六轴力传感器的工作原理主要依赖于应变片技术和弹性体结构设计。当外力作用于传感器时,弹性体发生形变,这种形变被应变片捕捉并转化为电信号。应变片是一种可以感应力的微小变化的敏感元件,其电阻值会随着形变而变化。这些变化通过测量电路转换为电压信号,进而反映出作用力的大小。为了同时测量六个自由度的力和扭矩,六轴力传感器通常采用多个应变片,并通过复杂的弹性体设计来确保每个方向上的力和扭矩可以被准确地区分和测量。此外,传感器内部还配备了信号处理电路,用于将应变片产生的微弱电信号放大并转换为标准化的输出信号,便于控制系统读取和处理。通过这种方式,六轴力传感器能够实现对复杂力环境下的精确测量。
三、六轴力传感器的分类
根据不同的设计原理和技术特点,六轴力传感器可以分为多种类型:
按敏感元件分类:
电阻应变式:这是应用最为广泛且技术成熟的类型之一。其基本工作原理是在外力作用下,弹性体结构形变,贴在弹性体上的应变片随之发生应变,引起电阻的变化。通过电路将电阻的变化转化为电压或电流的变化。
压电式:利用某些材料在受到机械应力时产生电荷的特性,通过测量这些电荷的变化来测定力或扭矩。
电容式:力敏电容器的核心部分是对压力敏感的电容器。当硅膜片两边存在压力差时,硅膜片产生形变,板间的间距发生变化,从而引起电容的变化。
电感式:通过感应线圈的变化来测量力或扭矩。
光电式:利用光的变化来检测力或扭矩的变化。
按测力原理分类:
电阻式应变式:基于应变片技术,通过应变片的电阻变化来测量力或扭矩。
电容式:通过电容的变化来测量力或扭矩。
电感式:通过感应线圈的变化来测量力或扭矩。
压电式:利用压电材料的特性来测量力或扭矩。
光电式:利用光的变化来检测力或扭矩的变化。
按结构分类:
矩阵解耦型:各路输出相互耦合,即加载某一方向的力时,所有通道都会有输出。采集到所有通道的信号后,需要通过解耦矩阵进行运算才能得到各个力和扭矩的分量。
结构解耦型:各路输出相互独立,加载某一方向的力时,只有对应通道有输出。直接采集各通道的信号,除以相应的灵敏度系数即可得到各个力和扭矩的分量
四、六轴力传感器的应用
工业机器人
在工业机器人中,六轴力传感器常被安装在机器人的末端执行器上,用于实现精细的力控制和力反馈。例如,在组装精密电子元件或执行精密打磨任务时,传感器可以帮助机器人实时调整力度,避免损伤工件或工具。
虚拟现实与增强现实
六轴力传感器也被广泛应用于虚拟现实(VR)和增强现实(AR)系统中,以实现更为真实的触觉反馈。通过在VR手套或其他穿戴设备中集成这类传感器,用户可以在虚拟环境中感受到真实的物理交互效果。
医疗健康
在医疗领域,六轴力传感器可用于手术机器人,帮助医生更精确地控制手术工具,减少手术风险;同时,也可以用于康复训练设备中,监测患者在康复过程中的力变化情况,辅助医生制定个性化的康复计划。
无论是工业生产还是日常生活,#六轴力传感器#都将在提高效率、保证安全方面发挥着越来越重要的作用。
